

Государственный комитет Российской Федерации по высшей школе.
Омский государственный технический университет.
Кафедра информатики и вычислительной техники.
Реферат
по дисциплине “Основы теории проектирования”.
Тема: “Мехатронные устройства на примере накопителя на магнитных дисках типа “винчестер””.
ВЫПОЛНИЛИ студенты гр. ИВ-318
_______ Борисов К. Е.
______ Нелюбин Д. В.
РУКОВОДИТЕЛЬ
_
________ Елькин Б.И.Что такое мехатроника?
Современный термин "Мехатроника" ("Mecha-tronics"), согласно японским источникам, был введен фирмой Yaskawa Electric в 1969 г. и зарегистрирован как торговая марка в 1972 г. Это название получено комбинацией слов "МЕХАника" и "ЭлекТРОНИКА". Объединение этих понятий в едином словосочетании означает интеграцию знаний в соответствующих областях науки и техники, которая позволила совершить качественный скачок в создании техники новых поколений и производстве новейших видов систем и оборудования. Интеграция электромеханики и микроэлектроники привела к появлению комплектных интегрированных мехатронных модулей движения рабочих органов и узлов машин, а также создаваемого на их основе оборудования.
К началу 80-х годов термин "Мехатроника" утверждается в мировой технической литературе как название целого класса машин с компьютерным управлением движением. При этом интегрируются достижения не только в области электромеханики и электроники, но и систем компьютерного управления движениями машин и сложных пространственных механизмов.
Мехатроника находится только в стадии становления, и поскольку до настоящего времени ее определение и базовая терминология еще полностью не сформированы, то представляется целесообразным рассмотреть определения, выражающие суть предмета мехатроники как в широком, так и в узком (специальном) смысле.
Общее определение мехатроники в широком понимании дано в Государственном образовательном стандарте РФ междисциплинарной специальности 07.18 "Мехатроника" (1995 г.).
"Мехатроника" - это новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов".
В данном определении особо подчеркнута триединая сущность мехатронных систем (МС), в основу построения которых заложена идея глубокой взаимосвязи механических, электронных и компьютерных элементов. Известно несколько определений, опубликованных в периодических изданиях, трудах международных конференций и симпозиумов, где понятие о мехатронике конкретизируется и специализируется. На основе рассмотренных выше определений предлагается следующая специальная формулировка предмета мехатроники.
"Мехатроника изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, систем, машин и комплексов машин с интеллектуальным управлением их функциональными движениями".
Мехатроника изучает особый методологический (концептуальный) подход
к построению машин с качественно новыми характеристиками. Важно подчеркнуть, что этот подход является весьма универсальным и может быть применен в машинах и системах различного назначения. Однако следует отметить, что обеспечить высокое качество управления мехатронной системой можно только с учетом специфики конкретного управляемого объекта. Поэтому изучение мехатроники целесообразно осуществлять по специальностям, предметом которых являются конкретные классы производственных машин и процессов.В определении подчеркивается синергетический характер интеграции составляющих элементов в мехатронных объектах. Синергия (греч.) - это совместное действие, направленное на достижение единой цели. При этом принципиально важно, что составляющие части не просто дополняют друг друга, но объединяются таким образом, что образованная система обладает качественно новыми свойствами. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели - реализации заданного управляемого движения.
Интегрированные мехатронные элементы выбираются разработчиком уже на стадии проектирования машины, а затем обеспечивается необходимая инженерная и технологическая поддержка при производстве и эксплуатации машины. В этом радикальное отличие мехатронных машин от традиционных, когда зачастую пользователь был вынужден самостоятельно объединять в систему разнородные механические, электронные и информационно-управляющие устройства различных изготовителей. Для сложных систем традиционный подход к проектированию не мог дать результатов, приемлемых по надежности и эффективности работы, поэтому мехатронный подход в последнее время применяется практически во всех сложных высокотехнологичных системах.
Методологической основой разработки мехатронных систем служат методы параллельного проектирования (concurrent engineering methods). При традиционном проектировании машин с компьютерным управлением последовательно проводится разработка механической, электронной, сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков. Принцип параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонентов системы.
В современных мехатронных системах для обеспечения высокого качества реализации сложных и точных движений применяются методы интеллектуального управления (advanced intelligent control). Данная группа методов опирается на новые идеи в теории управления, современные аппаратные и программные средства вычислительной техники, перспективные подходы к синтезу управляемых движений мехатронной системы.
Следует отметить, что мехатроника как новая область науки и техники находится в стадии своего становления, ее терминология, границы и классификационные признаки еще строго не определены. Думается, что на нынешнем этапе первостепенное значение имеет выявление сущности новых принципов построения и тенденций развития машин с компьютерным управлением движением, а соответствующие семантические понятия и определения, безусловно, со временем устоятся.
Немного истории.
Устройство для хранения информации на основе вращающегося магнитного диска было разработано фирмой IBM в самом начале 70-х годов. Этот громоздкий 14-дюймовый диск позволял записать 30 дорожек по 30 секторов в каждой из них; обозначение диска "30/30" напоминало название широко распространенной модели ружья фирмы "Winchester", в результате чего в английском языке для обозначения дисковых устройств с несъемными дисками стали широко применять слово "winchester" (винчестер). В 1973 году фирма IBM создала первый накопитель с несколькими дисками емкостью 140 Мб, который продавался по цене $8600.
При разработке первой модели компьютера IBM PC в нем не был предусмотрен встроенный винчестер, однако уже в следующей модели он был установлен (20 Мб). В компьютере PC AT винчестер уже являлся основным средством повышения эффективности компьютера - пользователям не требовалось больше загружать операционную систему с дискет и искать каждый раз новую дискету при начале работы с какой-либо программой. Возможность хранения на встроенном диске больших объемов данных и программ значительно расширила диапазон использования персональных компьютеров.
Сегодня жесткий диск стал неотъемлемой частью любого компьютера. Появились многочисленные стандарты, позволяющие работать со все большими скоростями и хранить большие объемы данных. Сегодняшние технологические решения в области конструирования винчестеров намного превосходят те, которые были 30 лет назад. Современный жесткий диск представляет собой сложную мехатронную систему.
Устройство винчестера.
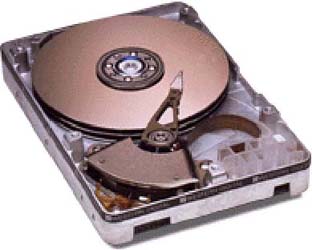
Рисунок 1. Современный винчестер со снятой крышкой.
Винчестер состоит из следующих компонентов:
Рассмотрим все эти компоненты более подробно:
Привод шпинделя:
Магнитные диски, которых обычно бывает от одного до трех, и редко - больше, собраны в так называемый дисковый пакет, насаженный на ось - шпиндель, под которым (или прямо внутри него) находится двигатель, создающий вращающееся магнитное поле. Это достигается размещением по окружности двигателя нескольких обмоток, через которые при помощи специальной схемы по очереди пропускается ток. На самом шпинделе закреплен постоянный магнит, который под действием этого поля тоже начинает вращаться, раскручивая дисковый пакет. В первых моделях винчестерах двигатель размещался отдельно и соединялся со шпинделем дополнительными передачами, что усложняло схему и затрудняло управление скоростью вращения.
Привод головок:
Рядом с дисковым пакетом находится система поворотных рычагов, на концах которых установлены магнитные головки записи/считывания. Для перемещения головок в винчестере служит собственный двигатель.
В более ранних моделях рычаги были закреплены на оси шагового двигателя, и расстояние между дорожками определялось величиной шага. В современных моделях используется так называемый линейный двигатель, который не имеет какой-либо дискретности, а установка на дорожку производится по сигналам, записанным на дисках, что дает значительное увеличение точности привода и плотности записи на дисках.
Линейный двигатель представляет собой две обмотки, закрепленные на противоположном головкам конце рычага, которые находятся в поле постоянного магнита. При прохождении тока через обмотки создается второе магнитное поле, взаимодействующее с первым и стремящееся установить поворотную систему в строго определенное положение, зависящее от силы и полярности тока в обмотках. При плавном изменении тока система рычагов будет плавно поворачиваться вокруг своей оси, перемещая головки по дуге, близкой к радиусу дисков. Такая система привода головок получила название прямой или линейной, или, в английском варианте, Voice Coil (звуковая катушка) - по аналогии с диффузором громкоговорителя.
Здесь же обычно расположена так называемая магнитная защелка - маленький постоянный магнит, который при крайнем внутреннем положении головок (landing zone - посадочная зона) притягивается к поверхности статора и фиксирует рычаг в этом положении. Это так называемое парковочное положение головок, которые при этом лежат на поверхности диска, соприкасаясь с нею. При запуске винчестера схема управления линейным двигателем “отрывает” фиксатор, подавая на двигатель усиленный импульс тока. В посадочной зоне дисков информация не записывается.
Гермоблок:
Гермоблок представляет собой камеру, в которой размещены основные механические и часть электронных компонентов. Кроме пакета дисков и блока головок, гермоблок содержит микросхему коммутатора головок и первичного усилителя, размещенную внутри для ослабления помех, и воздушный фильтр, улавливающий случайные пылинки, неизбежно возникающие при работе механических систем. Внутри гермоблок заполнен обеспыленным воздухом под атмосферным давлением; в любом винчестере обязательно есть гибкая мембрана, а чаще всего - наружный воздушный фильтр, предназначенный для выравнивания внешнего и внутреннего давлений. Если бы гермоблок действительно был полностью герметичным - перевозка винчестера, например, в грузовом отсеке самолета могла бы привести к деформации крышки и соединенных с нею осей шпинделя и рычагов привода головок.
Несущая конструкция:
Эта конструкция объединяет гермоблок и плату, на которой расположены электронные компоненты. Она состоит из массивной металлической рамы, которая своими размерами точно совпадает со стандартным отсеком крепления и защищает механику от деформаций. Для дополнительной защиты от вибрации на некоторых винчестерах предусмотрены резиновые элементы. Кроме того, несущая конструкция выполняет функции охлаждающего радиатора.
Пакет дисков:
Диски изготовлены чаще из алюминия, реже - из керамики или стекла, и покрыты тонким слоем окиси хрома, которая имеет существенно большую износостойкость, чем покрытие на основе окиси железа в ранних моделях. Дисков редко бывает больше трех. Основная их функция – нести информацию. Кроме пользовательской информации на диске записана контрольно-служебная информация и сервометки, предназначенные для точного позиционирования головок и управления скоростью вращения шпинделя, которая составляет несколько тысяч оборотов в минуту (обычно 5400 и 7200).
Считывающие головки:
По традиции для записи/считывания информации с поверхности диска использовались индуктивные головки. Основной недостаток индуктивной головки считывания - сильная зависимость амплитуды сигнала от скорости перемещения магнитного покрытия и высокий уровень шумов, затрудняющий верное распознавание слабых сигналов. Магниторезистивная головка считывания представляет собой резистор, сопротивление которого изменяется в зависимости от напряженности магнитного поля, причем амплитуда уже практически не зависит от скорости изменения поля. Это позволяет намного более надежно считывать информацию и диска и, как следствие, значительно повысить предельную плотность записи. Магниторезистивные головки используются только для считывания; запись по-прежнему выполняется индуктивными головками.
Управляющий микропроцессор:
Современный винчестер представляет собой самостоятельный микрокомпьютер - с собственным процессором, памятью, устройствами ввода/вывода и т.п. Его основные функции:
Программа для микропроцессора храниться в ПЗУ или в специальной области диска.
Схемы усиления и распознавания:
В старых винчестерах декодирование считанной информации выполнялось путем непосредственного слежения за амплитудой, частотой или фазой считанного сигнала. Но сегодня плотность записи стала такой большой, что уже невозможно четко и однозначно считывать сигнал с поверхности диска - уровень помех и искажений очень велик. Вместо прямого преобразования сигнала используется его сравнение с набором образцов, и на основании максимальной похожести делается заключение о приеме того или иного кодового слова, эту работы и выполняют данные схемы. Такую технологию называют PRML (Partial Response, Maximum Likelihood) - максимальное правдоподобие при неполном отклике.
Внешний источник энергии:
Основным источником энергии винчестера является блок питания компьютера. На жесткий диск через стандартный разъем подаются напряжения +5 и +12 В.
Внутренний источник энергии:
При внезапном отключении внешнего питания очень важно не повредить имеющуюся на диске информацию. Для этого необходимо заблокировать подачу тока записи в магнитные головки и переместить их в посадочную зону. Источниками энергии при этом являются либо оставшийся заряд конденсаторов на плате электроники, либо работа электродвигателя привода шпинделя в режиме генератора.
Работа винчестера.
При включении питания микропроцессор винчестера выполняет тестирование электроники, после чего выдает команду включения шпиндельного двигателя. При достижении некоторой критической скорости вращения плотность увлекаемого поверхностями дисков воздуха становится достаточной для преодоления силы прижима головок к поверхности и поднятия их на высоту от долей до единиц микрон над поверхностями дисков - головки "всплывают". С этого момента и до снижения скорости ниже критической головки "висят" на воздушной подушке и совершенно не касаются поверхностей дисков, поэтому ни диски, ни сами головки практически не изнашиваются.
После достижения дисками скорости вращения, близкой к номинальной головки выводятся из посадочной зоны, и начинается поиск сервометок для точной стабилизации скорости вращения. Поскольку в любой зоне дисков присутствует серворазметка, то сервоимпульсы начинают поступать с головок сразу же после начала вращения, и по их частоте можно судить о скорости вращения дисков. Система стабилизации вращения постоянно следит за потоком сервоимпульсов, и при достижении номинальной скорости происходит так называемый “захват”, при котором любое отклонение скорости вращения сразу же корректируется изменением тока в обмотках двигателя.
При достижении номинальной скорости вращения освобождается фиксатор привода головок, и система управления проверяет его способность поворачиваться и удерживаться на выбранном месте. Для этого делается серия быстрых поворотов в разные стороны, что на слух воспринимается, как характерное “тарахтение” винчестера через несколько секунд после старта. Во время перемещения головок постоянно идет слежение за поступающими с головок сервоимпульсами, и система управления всегда знает, над сколькими дорожками прошла головка. Аналогично происходит и удержание головки над выбранной дорожкой - при отклонении от центра дорожки изменяется величина и форма сервоимпульсов, и система управления ликвидирует отклонение, изменяя ток в обмотках привода. Во время тестирования привода головок заодно делается и его калибровка - подбор параметров управляющих сигналов для наиболее быстрого и точного перемещения головок при минимальном количестве “промахов”.
Затем выполняется считывание информации из служебной зоны. В ПЗУ винчестера храниться только программа начального запуска. В ОЗУ же загружаются остальные части управляющей программы. Кроме всего прочего, в ОЗУ загружается так называемая карта переназначения дефектов, в которой отмечены дефектные секторы, выявленные при заводской разметке дисков; эти секторы исключаются из работы и подменяются резервными, которые имеются на каждой дорожке и еще в отдельных зонах каждого диска. Таким образом, даже если диски и имеют дефекты (а при современной плотности записи они имеют их всегда), для пользователя создается впечатление “чистого”
винчестера, свободного от сбойных секторов.После начальной настройки электроники и механики микрокомпьютер винчестера переходит в режим ожидания команд от контроллера, расположенного на системной плате. Получив команду, он включает нужную головку, по сервоимпульсами отыскивает нужную дорожку, дожидается, пока до головки “доедет” нужный сектор, и выполняет считывание или запись информации. Если контроллер запросил чтение/запись не одного сектора, а нескольких - винчестер может работать в так называемом блочном режиме, используя ОЗУ в качестве буфера и совмещая чтение/запись с передачей информации к контроллеру или от него.
Во время работы постоянно работает система слежения за положением головки на диске: из непрерывно считываемого сигнала выделяется сигнал рассогласования, который подается в схему обратной связи, управляющую током обмоток привода головок. При отклонении головки от центра дорожки в обмотках возникает сигнал, стремящийся вернуть ее на место.
При отключении питания микропроцессор выдает команду на установку головок в парковочное положение, которая успевает выполниться до снижения скорости вращения ниже критической.
Источники.